PhD at NYU studying reasoning, decision-making, and open-endedness
alum of MIT | prev: Google, MSR, MIT CoCoSci
https://upiterbarg.github.io/
Ulyana Piterbarg
Loading...
Our approach introduces an algorithm, LintSeq, for sampling across interdependent lines in source code by using a code linter
With LintSeq, we can generate plausible edit *trajectories* for any source code file, covering possible ways of synthesizing its contents edit-by-edit with no linter errors
Thank you to @sloanfoundation.bsky.social for this generous award to our lab. Hopefully this will bring us closer to building truly general-purpose robots!
Finally finally finally some scaling curves for imitation learning in the large-scale-data regime: arxiv.org/abs/2411.04434
Can we extend the power of world models beyond just online model-based learning? Absolutely!
We believe the true potential of world models lies in enabling agents to reason at test time.
Introducing DINO-WM: World Models on Pre-trained Visual Features for Zero-shot Planning.
(Many) more details in our paper! arxiv.org/abs/2410.02749
LMs trained to synthesize programs by repeatedly editing their own generations produce more diverse code compared to baselines
This improves the trade-off between test-time FLOPs and pass@k
Our paper showing that LMs benefit from human-like abstractions for code synthesis was accepted to ICLR! 🇸🇬
We show that order matters in code gen. -- casting code synthesis as a sequential edit problem by preprocessing examples in SFT data improves LM test-time scaling laws
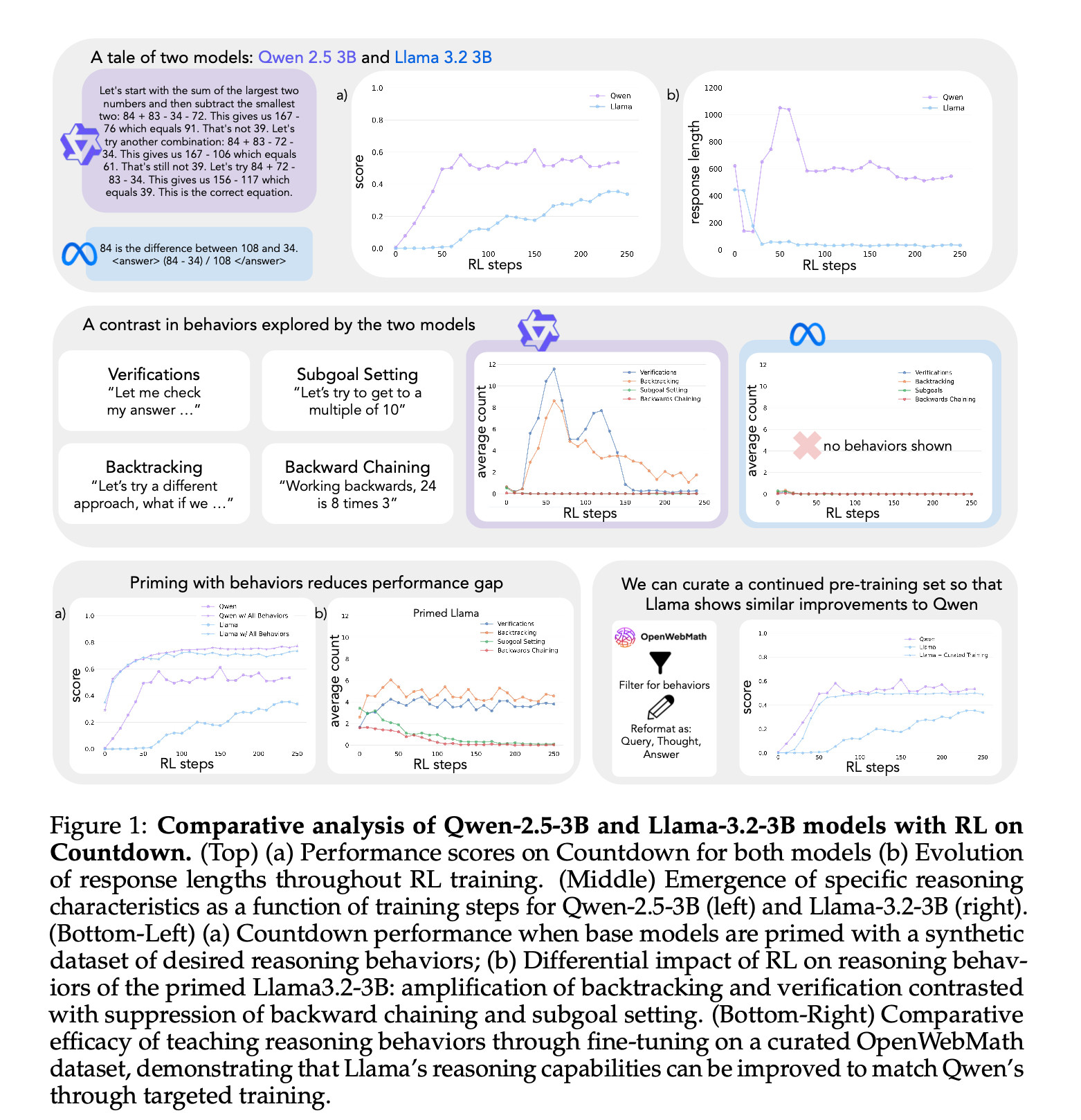
1/13 New Paper!! We try to understand why some LMs self-improve their reasoning while others hit a wall. The key? Cognitive behaviors! Read our paper on how the right cognitive behaviors can make all the difference in a model's ability to improve with RL! 🧵
Ulyana Piterbarg
Eugene Vinitsky 🍒
Introducing 🧞Genie 2 🧞 - our most capable large-scale foundation world model, which can generate a diverse array of consistent worlds, playable for up to a minute. We believe Genie 2 could unlock the next wave of capabilities for embodied agents 🧠.
Lerrel Pinto
Now that @jeffclune.bsky.social and @joelbot3000.bsky.social are here, time for an Open-Endedness starter pack.
go.bsky.app/MdVxrtD
Ulyana Piterbarg
Ulyana Piterbarg
Video
Ulyana Piterbarg
The performance of embodied agents has been shown to improve by increasing model parameters, dataset size, and compute. This has been demonstrated in domains from robotics to video games, when generat...
🎉Congrats to the 126 early-career scientists who have been awarded a Sloan Research Fellowship this year! These exceptional scholars are drawn from 51 institutions across the US and Canada, and represent the next generation of groundbreaking researchers. sloan.org/fellowships/...